等身大自立型ロボット!
音声認識ロボット hal9000_1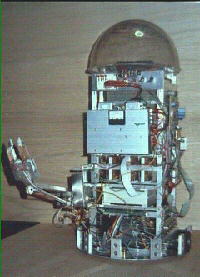 1983年作品
1983年作品
64語の音声に従い活動する
手足があり
無線で命令を下すと
進行方向、距離を判断して
移動するロボット
NHK教育テレビで紹介されました。SBC放送で紹介されました。
画像認識ロボット hal9000_2
1985年作品
物体を認識し
そこに近ずく物体は、三角、四角、丸、長方形apple2で画像認識を行った
SBC放送で紹介されました。
画像認識ロボット hal9000_3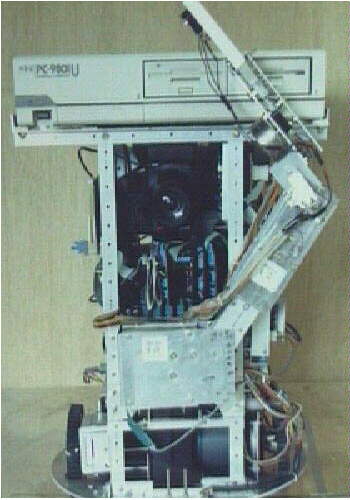
pc9801と
ニューロコンピュータ(necニュ-ロ07)
を使用して動物の絵10枚を認識し
その動物の絵を示しに移動する
NECニューロフォーラムで発表しました。
音声認識ロボット hal9000_3
 実は子供と等身大のロボットです
実は子供と等身大のロボットです
等身大ロボットで一番必要な電源について
自立型ロボットでは電源が一番大切です バッテリーまたはニッカド電池、水素電池から 5V10A、12V2A、-12V2A など様々な電圧の電源を作り出します。 バッテリ12Vからスイッチング電源で 効率よく各電圧を作ります。 無停電装置と自動車搭載用100Vでも 実現できますが、効率が悪いため、 単独のスイッチング電源を作ると良いで しょう
回路図{kind=link}
このロボットHALL9000_3 の頭脳はNECニューロ07です
ホームに戻る